Unity TA(二)渲染管线与基础数学
- 11 9 月, 2024
- by
- pladmin
一、渲染管线概述
管线一共可以分为3大概念阶段:应用阶段、几何阶段、光栅化阶段。
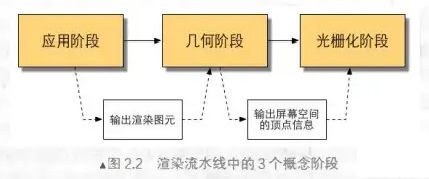
应用阶段:主要是准备好各种场景数据:例如相机位置、视锥体、场景里的模型、纹理光源等,简单做一些粗粒度剔除(剔除太远看不到的物体),最终输出渲染图元(例如点、线、三角面),传递给几何阶段
几何阶段:几何阶段的一个重要任务是:使用空间变换 将顶点变换到屏幕空间,并传递打包每个顶点对应的深度值、着色、法线等相关信息,交给光栅化阶段
光栅化阶段:使用几何阶段传递来的数据在屏幕上产生像素,决定每个渲染图元的哪些像素应该被绘制到屏幕上。它需要对几何阶段得到的逐顶点数据(纹理坐标、顶点颜色……)进行插值,然后进行逐像素处理并渲染出最终图像
每个阶段的各个模块功能详见C++光栅化软渲染器(上)框架篇 – PULUO
整个硬件之间的协作流程如下图:
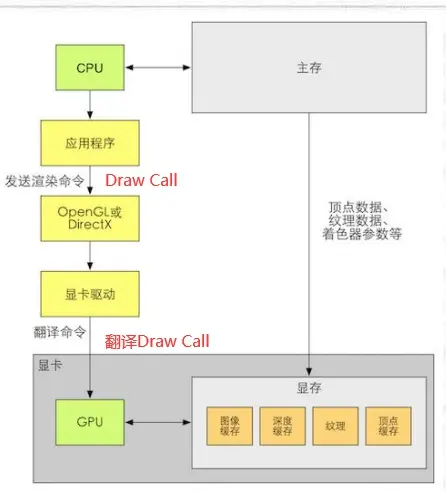
所谓DrawCall,就是CPU调用图像编程接口,以命令GPU进行渲染工作。计算机维护了一个命令队列,CPU不断往里面添加渲染命令,然后GPU接到队列中的命令后逐个执行。
CPU的DrawCall是非常耗时的,DrawCall越碎越多,最终的效率就越低。因此可以使用合批处理:把很多小的DrawCall合并成一个大的Draw Call。
需要注意的是,由于我们需要在CPU的内存中合并网格,而合并的过程是需要消耗时间的。因此,合批更加适合于那些静态的物体,例如不会移动的大地、石头等,对于这些静态物体我们只需要合并一次即可。当然,我们也可以对动态物体进行批处理。但是,由于这些物体是不断运动的,因此每一帧都需要重新进行合并然后再发送给GPU,这对空间和时间都会造成一定的影响。
二、空间变换与矩阵
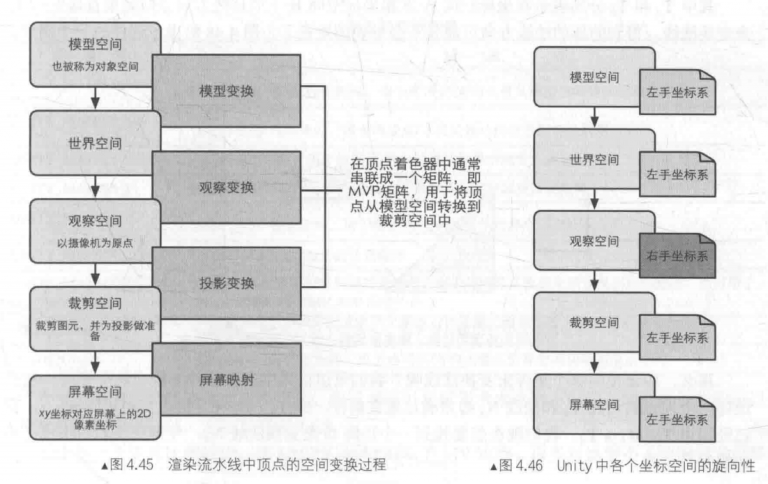
介绍方面的话就不多说了,直接进入主题。先复习一下渲染管线中,一个顶点是如何从模型空间的坐标计算出最终在屏幕上的坐标的:
像模型变换和观察变换,本质都是对顶点进行缩放、旋转、平移等操作完成的。因此首先要了解一下最基础的平移、旋转、缩放矩阵。
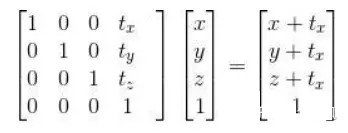
平移矩阵:
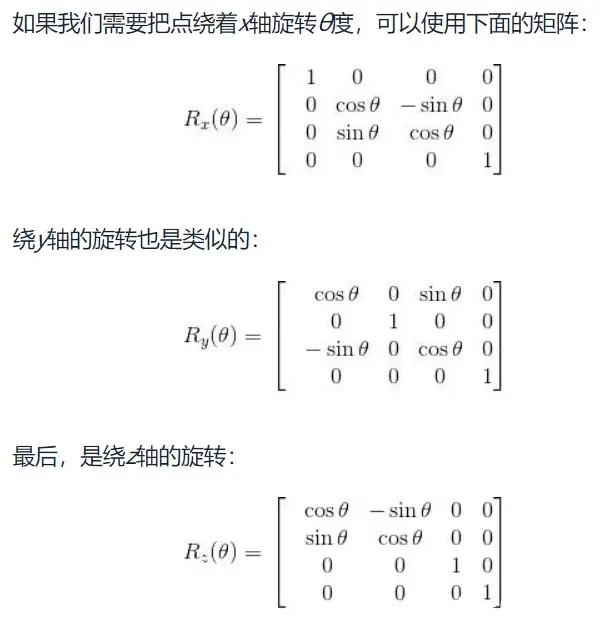
旋转矩阵:
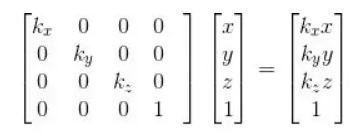
缩放矩阵:
对于这些矩阵有一些特征:

根据以上特征,可以得到一些计算顺序和技巧:
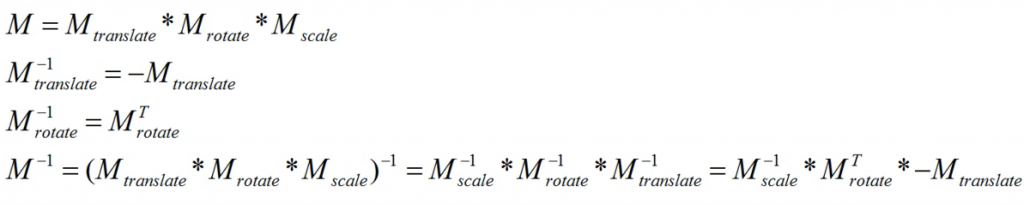
问:如果已知M,要逆推平移、旋转、缩放矩阵该怎么做呢?第四列的前三个数就是平移量,第一列数字的平方和开根号就是x的缩放,第二、三列对应y、z的缩放;给左上3×3子矩阵按列除以缩放值,得到的就是分解后的旋转矩阵。
模型变换和观察变换可以用上述矩阵组合得到,但是投影变换就没那么简单了。透视投影矩阵:
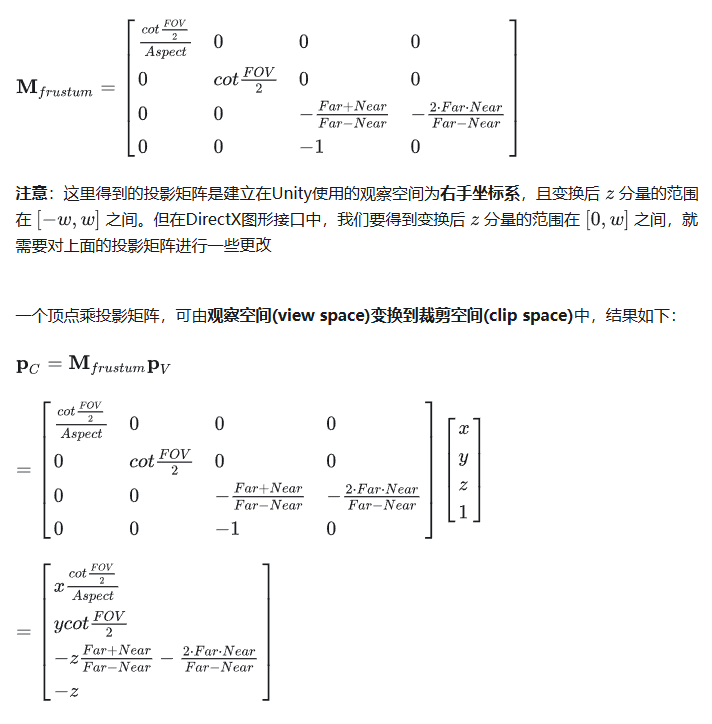
透视投影就是将视锥内的所有物体映射到一个(-1,-1,-1)到(1,1,1)的一个正方体空间内。
屏幕空间矩阵:
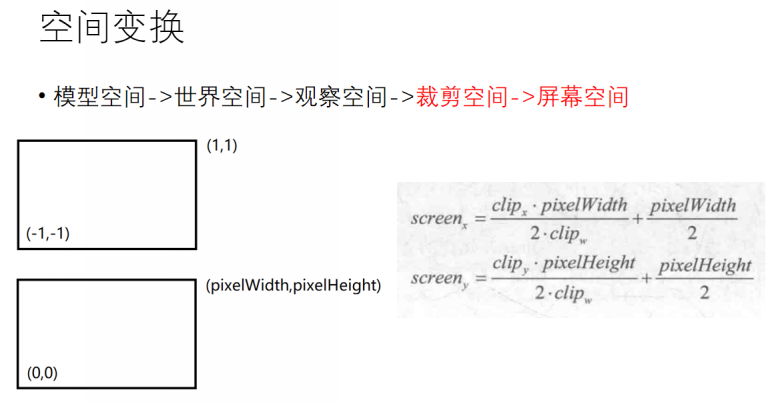
注意首先需要进行齐次除法(除以一个clipw),变换到NDC空间,再做屏幕空间的坐标转换。
综上,从模型空间到屏幕空间的变换顺序:
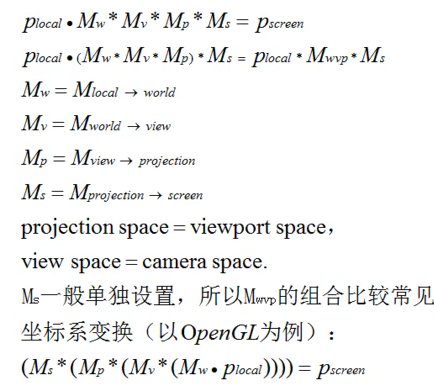
这里就是经典的mvp矩阵变换,先用m将模型空间转换为世界空间,再用v将世界空间转换为视角空间,再用p将视角空间变换为投影空间,最后用s将投影空间变换到屏幕空间。
最后再看一遍流程图:
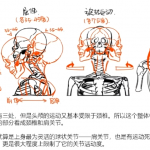
【特殊情况】法线变换
我们知道顶点在做空间变换的时候,可以根据上述知识直接构造出一个空间变换矩阵M。而一个顶点的切线,是由两个临近顶点作差得到的,因此切线也可以使用矩阵M来进行空间变换。
法线是要保证变换前后一直和所有切线垂直的,假设法线的变换矩阵是M’,要满足:(M’n)·(Mt)=0,最终可以推导出M’=(M^-1)T,即空间变换矩阵的转置逆矩阵。
三、欧拉角与四元数
欧拉角使用3个旋转弧度来表示在x、y、z轴上的旋转,绕右向量为pitch、绕上向量为yaw、绕前向量为roll。
优点:直观、存储量小(3个float)、没有无效的欧拉角(任何一个欧拉角都有旋转意义)
缺点:多个欧拉角可能会对应同一个旋转角度(解决方案:yaw、roll限制±180°,pitch限制±90°);万向节死锁(这个解决不了,所以只能使用后续的四元数)
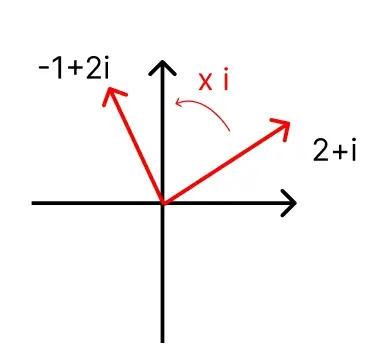
理解三维空间的四元数旋转确实有点困难,可以从更简单的情况(二维空间的旋转)入手来辅助理解。如下图,在二维坐标系下,将二维坐标写成(实数,虚数)的形式,那么对坐标乘以一个虚数i就可以起到旋转90°的作用:
上面是90°的特殊情况,推广到一般情况,乘以一个a+bi,那么其实就是将向量的模长翻根号a^2+b^2倍,然后旋转arctan(b/a)角度,如下图所示:
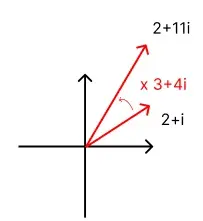
换一个说法,如果我们想要将一个向量(x,y)旋转θ°,那么只需要将(x+y*i)乘以一个(cosθ+sinθ*i)。(旋转二元数就是(cosθ,sinθ))
那么过渡到三维空间,应该很快能想到:再加一维新的虚数j,即(a+bi+cj)。但是根据“毛球定理”,只加一维是不够的。什么是毛球定理呢,首先对于一个二维的圆,我们可以让圆上的每个点拥有一个向量场(例如全部点都向切线方向移动,最终的结果呈现就是旋转),这样就可以形成一个旋转后的圆。但是对于三维的球,我们同样希望球上的每个点拥有一个连续的向量,那么一定会有两个点的向量为0,这就是毛球定理。
换言之,如果是用a+bi+cj来构造三维的旋转,那么总会存在点压根转不起来。因此需要继续扩展一个维度dk,变成a+bi+cj+dk 也就是我们所说的四元数。接下来看一些运算规则:
在二维坐标系中,i表示沿不存在的z轴旋转90°,以此类推j和k就可以分别表示x、y轴旋转90°。可想而知,如果某个点沿x轴旋转90°,再沿y轴旋转90°,最后沿z轴旋转90°,那么这个点就会跑到相反数的位置上,即:
(x,y,z)*i*j*k=(-x,-y,-z)
由此可得ijk=-1
其余部分,i、j、k都严格遵守所有复数运算规则。此外,四元数也有逆,表示反向旋转。四元数的逆的计算方法就是使用四元数的共轭复数除以四元数的模。
那么最后来看一下四元数的应用。假如我们将目标点(x,y,z)按轴(b,c,d)旋转a°(注意这个轴的向量表示必须是单位向量),那么其旋转四元数就是:(cosθ,sinθ*b,sinθ*c,sinθ*d),目标点(x,y,z)的四元数形式是(0,x,y,z)。计算方法为:目标点四元数左乘一个旋转四元数,并右乘一个旋转四元数的逆。
四、平面与射线
如何定义一个平面?假如我们选取一个点p0,其拥有一条法线n,那么所有与p0连接成向量后与n垂直的点p,就是该平面上的点:n(p-p0)=0;
换一种写法,令d=-np0那么满足np+d=0的p点就在该平面上,其中d/||n||就是平面到原点的距离。如果点p满足np+d>0,则p点在平面外侧,反之在内侧。
射线的定义就是p(t)=p0+tu,其中p0是射线的端点,u是方向向量,t是该方向向量的延长量。
图形学光线追踪中,就需要根据当前光线和目标面进行求交测试,得出该射线是否能命中对应面、命中点在哪里。因此可以根据上述面和射线的数学定义来计算命中点的坐标:
p(t)=p0+tu np+d=0
n(p0+tu)+d=0
t=(-d-np0)/nu
射线求交的场景应用:
①光线追踪,需要枚举大量的三角面与当前光线进行求交测试;
②碰撞盒检测,需要枚举碰撞盒的最少4个面与视线或枪线进行求交测试;
③鼠标点选,需要先将鼠标点击的屏幕坐标转化到世界空间,即先乘Ms-1,再乘Mp-1,最后乘Mv-1,这样可以得到目标点在世界空间中的坐标,连接相机点就形成了鼠标点击后发出来的射线
You may also Like
Unity TA(三)URP光照系统